Stalk Pusher - Capstone

about
Stalk lodging, or breakage of stalk beneath the ear, constitutes to 5 ~ 20% of maize loss annually. To reduce this failure rate, farmers need to continuously breed the strongest crop using selective breading. However, the current measure of strength, the rind penetration method, predicts only 18% of the variation of stalk strength. As such, it is the aim of our capstone, Stalk Pusher, to provide an accurate quantifier for crop strength that would enable farmers to find the strongest breed of crops reliably. This capstone is mentored by Professor Douglas Cook and Professor Daniel Robertson, and conducted along with my two teammates, Witold Passerat de la Chapelle
The device
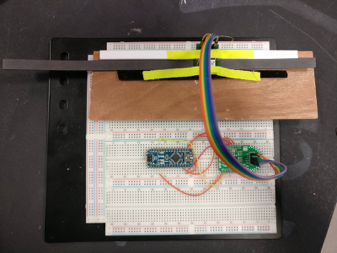
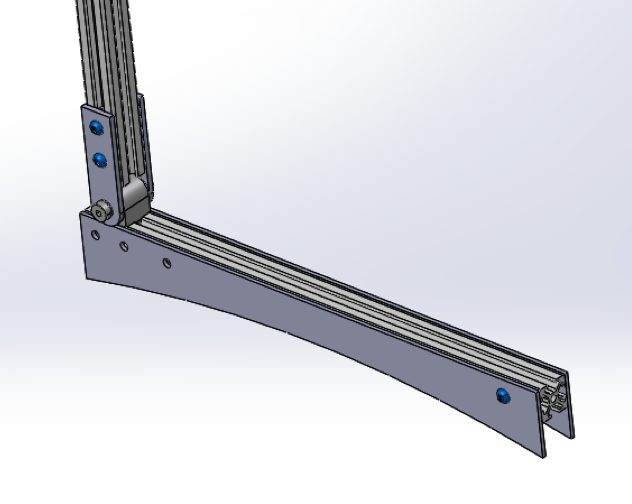
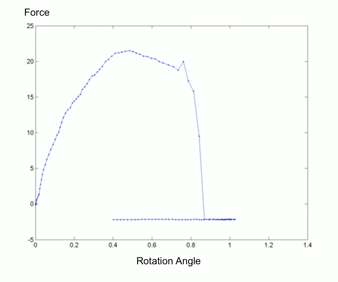
Through extensive testing, Professor Cook’s group at NYU Abu Dhabi have found the flexural rigidity of plants reliably predicts 81% of the variation of stalk strength, much higher than the current rind penetration test. As such, the aim of our device is to measure the flexural rigidity of the plants, which can be calculated from the displacement of the plant stalk and the corresponding force response. So, our device, as shown below, currently has a rotary sensor to measure the displacement and a load cell to measure the force response from the plant stalks.


My Role
The purpose of our capstone is to improve the Stalk Pusher developed by the previous Capstone project based on the user feedbacks. Through interfacing with the users, we have identified three main areas of improvement: the device failure rate, the graphical user interface, and the user experience. For this capstone, I oversee the improvement of the device failure rate and contribute extensively to the user experience of the device.
Aside from making the device more robust, I am also contributing to the better user experience of the device, currently I am exploring the possibility of using joystick as the physical interface and the feasibility of using a magnetic linear encoder to measure the height of the load cell automatically.
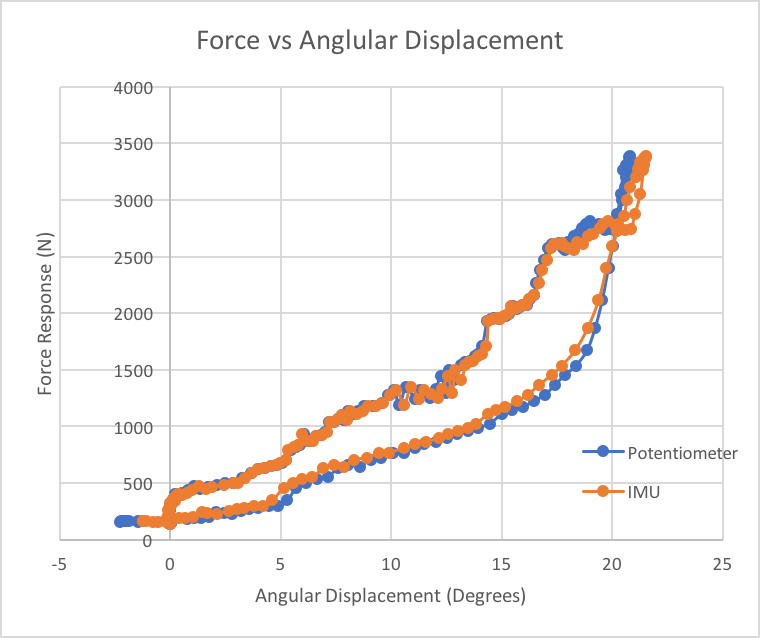
As of now, I have extensively tested the Kalman Fused IMU as the possible rotary sensor. The most prominent concern expressed by our mentor is the accuracy of such IMU. However, through my testing, it was found that the IMU’s angular data is as accurate as, if not better than, the angular data obtained previously using the potentiometer. Additionally, the use of IMU could also improve the robustness of the device, as the rotary sensor no longer needs to be at the axle of the rotation, which currently is in direct contact to the ground.